|
<< Click to Display Table of Contents > Motion Settings Dialog Type 14 |
  
|
|
<< Click to Display Table of Contents > Motion Settings Dialog Type 14 |
|
This dialog can be found in SAMLight → Settings → Extras → Motion Settings Dialog.
Here you can configure the motor as described in the file <SCAPS>\system\sc_motion_stepper_settings.txt.
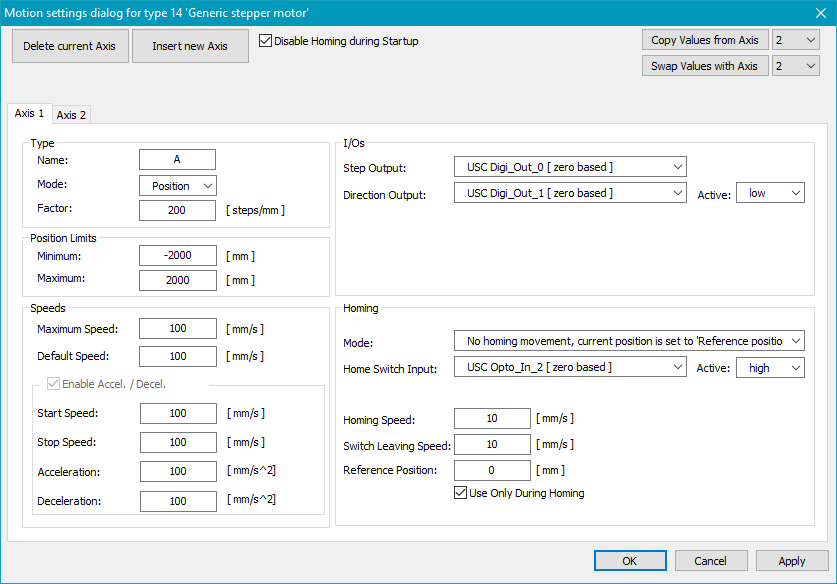
Figure 47: Direct motion control Home / Shift dialog
Disable Homing during Startup: Enable automatic homing after the SAMLight startup.
Delete current Axis: Delete the currently opened axis tab.
Insert new Axis: Add a new axis (max. 6 for Motion Type 14) at the end of the list
Copy Values from Axis: Choose an other axis in the drop down menu and copy all values in the current selected axis tab.
Swap Values with Axis: Choose an other axis in the drop down menu and swap all values between the selected and the current axis tab.
Type:
Name: Sets name of axis. Has to be an unique single capital letter for each axis.
Mode: Position[mm] as straight axis or Angle[°] as rotational axis can be chosen.
Factor: For 'mode=POSITION': Unit: [steps/mm]. For 'mode=ANGLE': Unit: [steps/ °], value has to be (1/360°)*'incperrot' Converts mm (or °) used in SAMLight into steps.
Position limits: Both values are read as double to increase the value range [-1E13, 1E13]. This limits should not contain 'refpos'.
Minimum: This parameters defines the lower limit of the axis.
Maximum:This parameters defines the upper limit of the axis.
Speeds: Unit depends on chosen axis. For planar Unit: [mm/sec] and for roation Unit: [ °/sec]
Maximum speed: Define the maximum moving speed.
Default speed: Sets default speed displayed in SAMLight user interface.
Enable Accel./Decel.: The checkbox is always enabled.
Start speed: Specify the speed, where the motor should start to accelerate.
Stop speed: Specify the speed, where the motor should end to decelerate.
Acceleration: This value defines the acceleration at the start of the motor. A value of '0' or '-1' disables acceleration /deceleration.
Deceleration: This value defines the deceleration at the start of the motor. A value of '0' or '-1' disables acceleration /deceleration.
|
When SAMLight Units are set to inch, the units in the motion settings dialog are set to inch as well, save for the acceleration and deceleration. Here, the units are still mm/s^2! |
I/Os:
Step output: Select the output bit for the step signals by the drop down menu.
Direction output: Select the output bit for the direction signals by the drop down menu.
active: Choose if the direction output bit state should be active high or active low.
Homing: This mode defines the behavior of homing.
Mode: Choose the required homing mode in the drop down menu. Homing is set off per default.
1.No homing movement, current position is set to 'Reference position'.
2.Go to switch in neg. direction and leave it in pos. dir.
3.Go to switch in pos. direction and leave it in neg. dir.
4.Uncommon: Go to switch in neg. direction and leave it in neg. dir.
5.Uncommon: Go to switch in pos. direction and leave it in pos. dir.
6.Uncommon: Go to switch in neg. sirection and leave it in pos. dir. (no timeout)
7.Uncommon: Go to switch in pos. direction and leave it in neg. dir. (no timeout)
Home switch input: Select the input bit for the home switch input signals by the drop down menu.
active: Choose if the input bit state should be active high or active low.
Homing speed: Specify the speed during the homing process.
Switch leaving speed: Specify the switch leaving speed.
Reference position: Set a reference position for the homing.
Use only during homing: If enabled, the reference position will be only used during the homing.
