|
<< Click to Display Table of Contents > Motion Control |
  
|
|
<< Click to Display Table of Contents > Motion Control |
|
Before the ScMotionControl object can be used the motion controller must be set up.
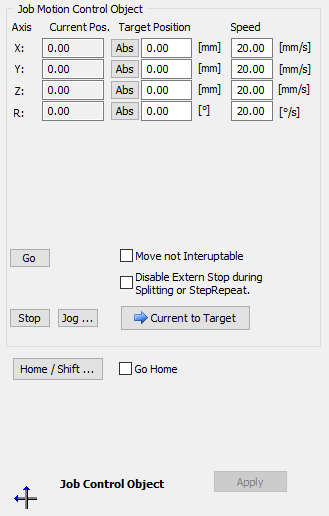
![]() The ScMotionControl object can be accesed in the Object Toolbar. Click on the motion control object to modify it within the Control property page. In this page the parameters can be assigned to the object. These can be motion control parameters as well as string parameters.
The ScMotionControl object can be accesed in the Object Toolbar. Click on the motion control object to modify it within the Control property page. In this page the parameters can be assigned to the object. These can be motion control parameters as well as string parameters.
Figure 282: Job control object motion dialog
|
Move: Axis: Definition of distance (dist) and speed (v) for each axis. Rel: If checked, a relative movement is performed instead of an absolute one. Go: Moves all axes to the defined values above. Stop: Stops the movement. In some cases you can loose the current position! Then a homing is necessary to re-calibrate your axes. Update: Updates actual positions. This might be necessary if manual motions are done. The Update Button is not available for stepper motor controllers. Jog...: Opens the Jog Dialog. Go Home: Enable this checkbox for setting up a homing procedure in a ScMotionControl object. In the Home / Shift dialog the related axes must be chosen. String Mode: A RS-232 string command can be send to the motion controller. |
|---|---|
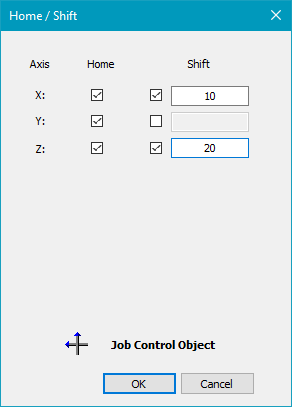
Figure 283: Job control object motion Home / Shift dialog |
Home: When the ScMotionControl object is executed, all axes with enabled Home checkbox will start the homing procedure. Shift: When the ScMotionControl object is executed, the shift values will be applied. To reset the current shift of an axis, enable the checkbox and set the value to 0. The Home and Shift functionalities can be combined, first the axis will do the homing procedure, then the shift will be applied. |
|
If a motor movement is desired, that is independent of the splitting, it has to be defined as a nonsplittable entity, see chapter Entity List. The speed of the motion controller can drop if the workload of the job is high. The highest priority is given to the signals to scanner and laser. The remaining time is used to generate stepper signals. The stepper signals of motion type 14 are given every 30us usually, depending on the capacity of the USC card this can be reduced. |
|---|